EPFL Engineers Unveil Handcrawler: A Robot with Detachable, Crawling Gripper for Enhanced Dexterity
Engineers at the Swiss Federal Institute of Technology Lausanne (EPFL) have introduced a groundbreaking robot called Handcrawler, designed to rethink how robotic dexterity is achieved. Unlike traditional humanoid robots that mimic human limitations, Handcrawler’s unique feature is its detachable, hand-like gripper that can crawl independently, pick up objects, and reattach to the main robot arm. This innovation allows the robot to extend its reach without moving its entire body, showcasing a new approach to robotic efficiency and flexibility.
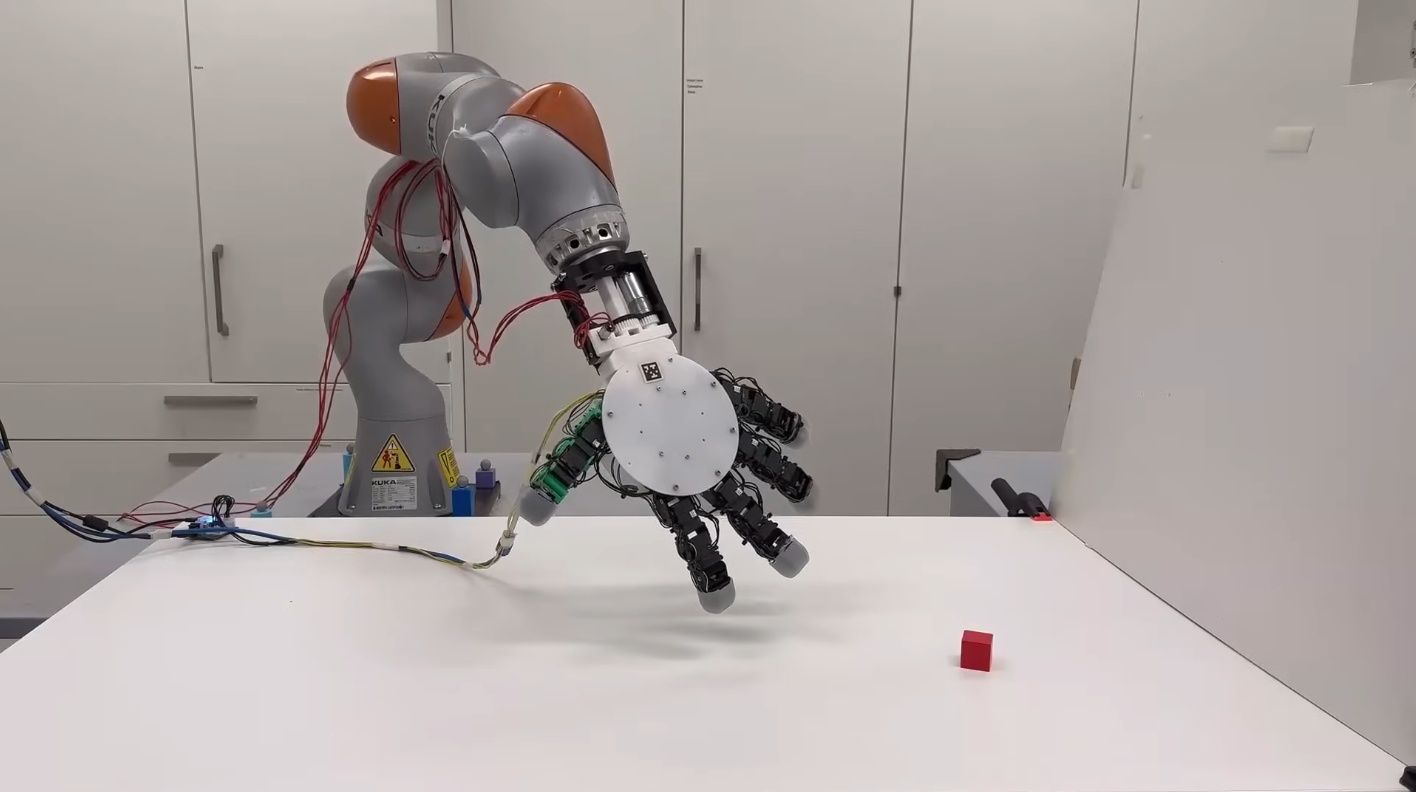
Revealed at the IEEE International Conference on Robotics and Automation in Rotterdam, Handcrawler’s gripper is double-sided, enabling it to grasp objects from either side without needing to rotate its wrist. The robot’s standout feature is its ability to detach the gripper, which then moves independently by “walking” across surfaces using its fingers. This ability was demonstrated in a video where Handcrawler’s gripper retrieves a cube that was out of reach, using its fingers for locomotion and then seamlessly reattaching to the main arm.
Currently operated via telecontrol, the engineers are developing an autonomous version that will use external localization to navigate. What sets Handcrawler apart is its capacity to grip and move simultaneously, a functionality rarely seen in robotics, where different mechanisms typically handle gripping and locomotion.
While practical applications for a robot with a detachable hand might not be immediately clear, Handcrawler showcases the potential for expanding robotic capabilities beyond human limitations. This project exemplifies how rethinking human-inspired design can unlock new possibilities in automation and robotics.